
HMS Industrial Networks: Sempre em movimento
Desafios de comunicação e segurança enfrentados pelos fabricantes de robôs móveis.

Os robôs móveis estão em todo o lado, desde armazéns a hospitais, e até nas ruas. É fácil perceber a sua popularidade; são mais baratos, mais seguros, mais fáceis de encontrar e mais produtivos do que os humanos. São fáceis de dimensionar e de combinar com outras máquinas. Uma vez que os robôs móveis recolhem imensos dados em tempo real, as empresas podem usá-los para iniciar a sua jornada na IdCI.
No entanto, para trabalharem de modo eficiente, os robôs móveis precisam de uma comunicação segura e fiável. Este artigo descreve os principais desafios de comunicação e segurança enfrentados pelos fabricantes de robôs móveis e apresenta uma forma simples de superar estes desafios para manter os robôs móveis em movimento.
O que são robôs móveis?
Antes de começarmos, cumpre definir o que queremos dizer com robôs móveis.
Os robôs móveis transportam materiais de um local para outro e estão disponíveis em dois tipos – veículos guiados automatizados (AGV) e robôs móveis autónomos (AMR). Os AGV usam infraestruturas-guia (fios, refletores ou fitas magnéticas) para seguir percursos predeterminados. Se um objeto estiver a obstruir o percurso de um AGV, este para e aguarda até que o objeto seja removido.
Os AMR são mais dinâmicos. Este tipo de robôs navega através de mapas e usa dados de câmaras, sensores integrados ou scanners a laser para analisar o ambiente envolvente e escolher o percurso mais eficiente. Se um objeto estiver a obstruir o percurso previsto de um AMR, este seleciona outro percurso. Como os AMR não dependem de infraestruturas-guia, a sua instalação é mais rápida e é possível adaptá-los às necessidades logísticas.
Quais são os desafios de comunicação e segurança enfrentados pelos fabricantes de robôs móveis?
1. Estabelecer uma ligação sem fios
O primeiro desafio para os fabricantes de robôs móveis é selecionar a tecnologia sem fios mais adequada. O conselho habitual é estabelecer os requisitos, avaliar os padrões e selecionar a melhor opção. Infelizmente, isto nem sempre é possível para os fabricantes de robôs móveis pois, frequentemente, não sabem onde será instalada a máquina nem os detalhes exatos da aplicação prevista.
Por vezes, uma ligação Bluetooth poderá ser ideal, uma vez que oferece uma ligação estável não-congestionada, ao passo que outras aplicações exigirão uma ligação de dados móveis segura de alta velocidade. O que seria útil para os fabricantes de robôs móveis seria disporem de uma tecnologia de ligação em rede fácil de adaptar de modo a satisfazer requisitos específicos.
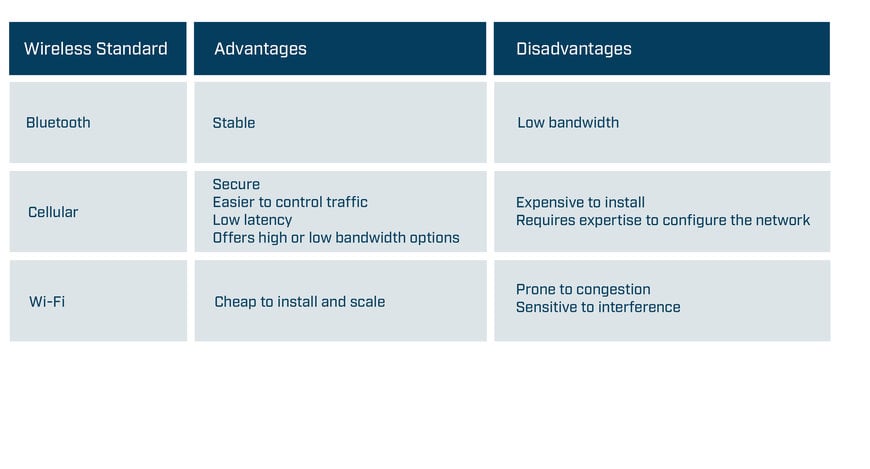
Figura 1.
Vantagens e desvantagens de alto nível de acordo com o padrão de ligação sem fios
O segundo desafio é garantir que a instalação funciona conforme planeado. Antes de instalar uma solução sem fios, deve ser realizado um estudo preditivo do local com base na planta das instalações para garantir que os robôs móveis têm cobertura de sinal suficiente em toda a área. O estudo do local deve identificar a localização ideal para os pontos de acesso, o tipo de antena correto, o ângulo ideal da antena e formas de mitigar interferências. Após a instalação, devem ser usadas ferramentas de análise de redes sem fios para verificar o design e ajustar pontos de acesso ou a antena conforme necessário.
2. Ligar robôs móveis a redes industriais
Apesar de usarem frequentemente diferentes protocolos industriais, os robôs móveis têm que comunicar com controladores no local em questão. Por exemplo, um AGV pode usar o protocolo CANopen e o controlador usar o PROFINET. Adicionalmente, os fabricantes de robôs móveis poderão querer usar o mesmo modelo de AGV noutro local onde o controlador use outra rede industrial, como EtherCAT.
Os fabricantes de robôs móveis também têm que garantir que os seus robôs móveis têm capacidade suficiente para processar o volume de dados necessário. O volume de dados necessário irá variar dependendo das dimensões e do tipo de instalação. As instalações de grandes dimensões podem usar mais dados pois os algoritmos de roteamento têm que abranger uma área maior, mais veículos e mais potenciais percursos. Os sistemas de navegação que usam tecnologia de navegação baseada em visão processam imagens, logo, exigem mais potência de processamento do que instalações que usem outros tipos de sistemas de navegação, como refletores. Consequentemente, os fabricantes de robôs móveis têm que encontrar soluções para os seguintes desafios:
1. Precisam de uma tecnologia de ligação em rede que suporte todas as principais redes fieldbus e Ethernet industriais.
2. A tecnologia de ligação em rede tem que ser fácil de alterar para permitir que os robôs móveis comuniquem na mesma rede industrial que os controladores sem que seja necessário alterar o design do hardware.
3. Têm que garantir que a tecnologia de ligação em rede tem capacidade e funcionalidade suficientes para processar os dados necessários.
3. Criar um sistema seguro
Criar um sistema onde os robôs móveis possam transportar material de forma segura é uma tarefa essencial, mas também desafiadora. Os fabricantes de robôs móveis têm que criar um sistema que considere todos os diversos tipos de robôs móveis, estruturas e pessoas presentes no ambiente. Têm que garantir que os robôs móveis reagem a ações externas, como a abertura de uma porta de segurança ou a ativação de um botão de paragem de emergência, e que a solução de ligação em rede consegue processar diferentes protocolos de segurança e interfaces. Têm que considerar que os AMR se movem livremente e gerir o risco de colisões em conformidade. A tecnologia usada em sensores está em constante evolução e os fabricantes de robôs móveis têm que acompanhar os desenvolvimentos para garantir que os seus produtos se mantêm tão eficientes quanto possível.
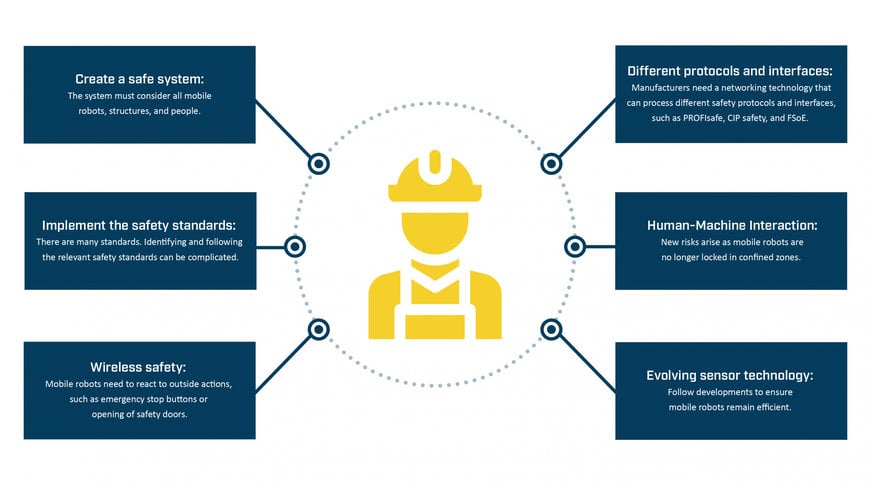
Figura 2.
Resumo dos desafios de segurança para os fabricantes de robôs móveis
Normas de segurança
As normas de segurança fornecem diretrizes sobre a implementação de componentes relacionados com a segurança, a preparação do ambiente e a manutenção das máquinas ou equipamentos.
Embora o cumprimento das diferentes normas de segurança (ISO, DIN, IEC, ANSI, etc.) seja maioritariamente voluntário, os fabricantes de máquinas na União Europeia estão legalmente obrigados a respeitar as normas de segurança estabelecidas nas diretivas relativas a máquinas. A Diretiva 2006/42/CE relativa às máquinas é sempre aplicável aos fabricantes de robôs móveis e, em algumas aplicações, a Diretiva 2014/30/UE também pode ser relevante, uma vez que regulamenta a compatibilidade eletromagnética dos equipamentos. A Diretiva 2006/42/CE relativa às máquinas descreve os requisitos para o design e a construção de máquinas seguras introduzidas no mercado europeu. Os fabricantes apenas podem afixar a marcação CE e entregar as máquinas aos clientes se conseguirem comprovar na declaração de conformidade o cumprimento dos requisitos estabelecidos na diretiva.
Embora o cumprimento das outras normas de segurança não seja obrigatório, os fabricantes devem respeitá-las na mesma, uma vez que ajudam a cumprir os requisitos da Diretiva 2006/42/CE relativa às máquinas. Por exemplo, os fabricantes podem seguir o estabelecido na norma ISO 12100 para reduzir os riscos identificados para riscos residuais aceitáveis. Podem usar a norma ISO 13849 ou IEC 62061 para descobrir o nível de segurança necessário para cada risco e garantir que a função de segurança correspondente cumpre os requisitos definidos. Os fabricantes de robôs móveis decidem como alcançar um determinado nível de segurança. Por exemplo, podem reduzir a velocidade do robô móvel para diminuir o risco de colisões e a gravidade das lesões para níveis aceitáveis. Ou podem garantir que os robôs móveis apenas funcionam em zonas separadas onde o acesso humano seja proibido (definidas como zonas confinadas na norma ISO 3691-4).
A melhor forma de os fabricantes de robôs móveis criarem um sistema seguro passa por identificar as normas adequadas e implementar os respetivos requisitos. Mas, tal como este resumo sugere, trata-se de um processo complicado e moroso.
4. Garantir uma comunicação CAN fiável
A comunicação baseada em tecnologia CAN é um padrão fiável e fácil de implementar usado desde a década de 1980 cuja popularidade continua a aumentar, principalmente devido à sua utilização em várias indústrias em expansão, como a Mobilidade elétrica e os Sistemas de armazenamento de energia em baterias (BESS). A comunicação CAN é simples, energeticamente eficiente e económica. Todos os dispositivos presentes na rede podem aceder a todas as informações e trata-se de um padrão aberto, o que significa que os utilizadores podem adaptar e ampliar as mensagem em função das suas necessidades.
O estabelecimento de uma ligação CAN está a tornar-se cada vez mais essencial para os fabricantes de robôs móveis, uma vez que lhes permite monitorizar as baterias de iões de lítio cada vez mais utilizadas nos sistemas de acionamento de robôs móveis, seja em sistemas modernizados ou em novas instalações. Os fabricantes de robôs móveis têm que fazer o seguinte:
2. Proteger os sistemas de interferências eletromagnéticas (IEM), uma vez que as IEM podem destruir os componentes eletrónicos de um sistema. O risco de IEM é significativo em modernizações pois a adição de novos componentes, como baterias junto ao cabo de comunicação, resulta na introdução de interferências eletromagnéticas de alta frequência.
5. Aceder remotamente aos robôs móveis
A capacidade de aceder remotamente ao sistema de controlo de uma máquina pode permitir aos fornecedores ou engenheiros de robôs móveis identificar e solucionar a maioria dos problemas sem terem que se deslocar ao local.
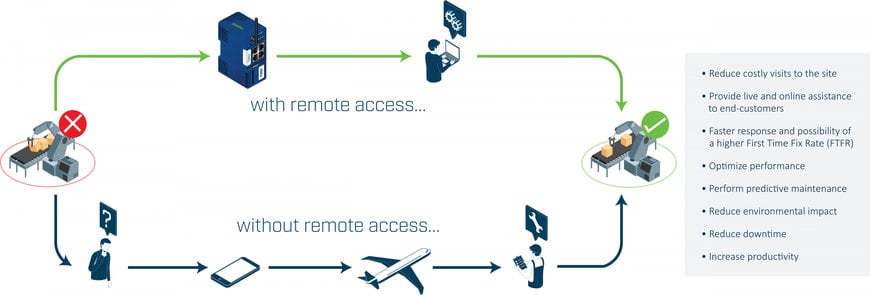
Figura 3.
Benefícios do acesso remoto
O desafio é criar uma solução de acesso remoto que garanta um equilíbrio entre as necessidades do departamento de TI e as do engenheiro ou fornecedor.
A função do departamento de TI é garantir que a rede permanece segura e fiável e mantém a sua integridade. Consequentemente, a solução de acesso remoto deve incluir as seguintes medidas de segurança:
- Usar ligações de saída, ao invés de ligações de entrada, para que o impacto na firewall seja o mínimo possível.
- Separar o tráfego relevante do resto da rede.
- Encriptar e proteger todo o tráfego para garantir a respetiva confidencialidade e integridade.
- Garantir que os fornecedores trabalham de acordo com ou possuem certificação de acordo com normas de segurança como a ISO 27001.
- Garantir que os fornecedores realizam auditorias de segurança regulares.
Os engenheiros ou fornecedores pretendem sistemas fiáveis e fáceis de utilizar. A ligação aos robôs móveis e o acesso às informações necessárias devem ser fáceis para os utilizadores. Caso seja necessário efetuar alterações à instalação, deve ser fácil dimensionar o número de robôs de acordo com o pretendido. Se os robôs móveis e os fornecedores ou engenheiros estiverem em países diferentes, a infraestrutura de ligação em rede tem que ter cobertura e redundância suficientes para garantir disponibilidade a nível mundial.
Conclusão
Como vimos, os fabricantes de robôs móveis têm que solucionar muitos desafios de comunicação e segurança. Têm que estabelecer uma ligação sem fios, enviar dados através de redes diferentes, garantir a segurança, estabelecer ligação a sistemas CAN e aceder remotamente aos robôs de modo seguro. E para dificultar ainda mais as coisas, cada instalação tem que ser reavaliada e adaptada em função dos requisitos específicos do local.
A melhor prática para implementar comunicações com robôs móveis
Os fabricantes de robôs móveis raramente são especialistas em comunicação ou segurança. Consequentemente, podem considerar que tentar desenvolver internamente a tecnologia de comunicação necessária é uma tarefa morosa e dispendiosa. Recorrer a soluções de comunicação de terceiros criadas propositadamente para o efeito não só resolve os desafios de comunicação existentes, como também garante outros benefícios.
As soluções de comunicação modernas apresentam um design modular que permite aos fabricantes de robôs móveis remover um produto de ligação em rede concebido para um padrão ou protocolo e substituí-lo por um produto concebido para outro padrão ou protocolo sem afetar nenhuma outra parte da máquina. Por exemplo, o Bluetooth pode ser o padrão de ligação sem fios mais adequado numa instalação, ao passo que noutra o Wi-Fi poderá garantir uma melhor cobertura. Do mesmo modo, num local podem ser usados os protocolos PROFINET e PROFIsafe, enquanto noutro serão usados protocolos industriais e de segurança diferentes. Em ambos os cenários, os fabricantes de robôs móveis podem usar produtos de comunicação para alterar a tecnologia de ligação em rede de forma a cumprir os requisitos locais sem efetuar alterações ao design do hardware.
Autores:
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
HMS Networks
A HMS Networks é uma empresa especialista em comunicação industrial sediada na Suécia que fornece várias soluções para comunicação com AGV. Descubra mais em www.hms-networks.com/agv
