
www.industria-portugal.com
29
'14
Written on Modified on
A "CAN FD" desafia os fieldbus e a Ethernet industrial em maquinaria com finalidades especiais.
A CAN FD oferece uma oportunidade para utilizar sistemas CAN e conhecimento CAN existentes, mesmo quando as exigências são elevadas para o número de nós, taxas de transferência e tempos e ciclo. Thomas Waggershauser da HMS explica como.
Aplicações possíveis para a CAN FD
As crescentes exigências no número de nós, taxas de transferência e tempos de ciclo, conduzem a pontos de congestão que as limitações da clássica CAN (8 bytes de dados e 1 Mbit/s de taxa de dados) não conseguem satisfazer. A taxa de dados que depende da expansão da rede e o curto comprimento de dados para dados de serviço e analógicos desempenham aqui um papel importante.
Na utilização diária, estas limitações são frequentemente contornadas por meio de compromissos: A divisão do sistema em diferentes segmentos de rede, em várias aplicações ou mesmo em redes paralelas, significa que a tecnologia existente está constantemente a ser esgotada, o que, frequentemente, conduziu a soluções que são complexas e dispendiosas, em termos de configuração, instalação e manutenção. Em princípio, um comutador para tecnologias Ethernet industriais de elevado desempenho seria possível. O nível aumentado de investimento normalmente necessário e a alteração nas estruturas de dados e no modo de pensamento para a configuração, em particular para sistemas controlados por tempo, representam frequentemente um desafio considerável em redes extensíveis. Para além disso, é necessário um comutador em ferramentas para o desenvolvimento, colocação em funcionamento e assistência, o que frequentemente dissuade muitos utilizadores de uma conversão completa.
Ao mesmo tempo, existe um desejo de continuar a utilizar o conhecimento existente de uma forma útil.
É aqui que a CAN FD desempenha um papel: a CAN FD (CAN com taxa flexível de dados) é uma versão alargada da bem conhecida e "clássica" CAN, lançada pela Bosch in 2012 e que alarga significativamente a taxa de dados e o comprimento de dados utilizáveis. Por outro lado, os conceitos CAN experimentados e testados foram mantidos: a arbitragem baseada em IDs de mensagens, despacho de mensagens orientado por eventos e reconhecimento de mensagens recebido por meio do bit de reconhecimento.
Taxa de dados melhorada
O reconhecimento de mensagens pelos recetores, que é utilizado no CAN clássico, oferece uma ampla variedade de vantagens por meio de confirmação do sucesso da transmissão dentro da mensagem transmitida. Os potenciais erros de transmissão são rapidamente detetados e os dados podem ser retransmitidos, de forma extremamente rápida.
A arbitragem das mensagens baseada no identificador CAN oferece também vantagens para aplicações de controlo, evitando colisões durante a transmissão de dados e providenciando tempos de aguardo curtos para mensagens de alta prioridade, mesmo em carregamentos de bus mais elevados.
A desvantagem dos métodos utilizados é que no momento da recolha das amostras, tem de existir o mesmo nível de bus em todos os nós, para evitar falhas. Por essa razão, um intervalo de bits tem de perfazer um tempo de propagação de sinal suficiente, disponível entre os dois nós mais remotos numa rede, incluindo a sua ativação de bus. O intervalo de bits e, consequentemente, também a taxa de dados, estão, deste modo, dependentes na extensão da rede; a uma expansão de 40 m até 1 Mbit/s é possível, mas a uma extensão de 250 m, cai para 250 kBits/s.
De forma a aumentar significativamente a taxa de dados sem alterar a tecnologia de comunicações, a CAN FD funciona com duas taxas de bits diferentes. A "taxa de arbitragem" para os comandos de controlo (incluindo arbitragem, tipo de mensagem, deteção de final e reconhecimento) é dependente da velocidade de propagação e, dessa forma, da extensão da rede. Por contraste, uma segunda "taxa de bits de dados" é, opcionalmente, também utilizada para o teor de dados e para a segurança de dados. Neste momento, apenas o transmissor de mensagens ocupa o bus, o que significa que o feedback direto dentro do tempo de bits é desnecessário. A taxa de dados máxima alcançável é, por isso, apenas dependente da característica de transmissão do meio de transmissão e não da propagação do sinal. Atualmente, as redes CAN FD permitem uma utilização produtiva com 8 MBits/s, mediante a qual o padrão CAN FD permite até 15 Mbits/s. Esta taxa de bits foi também utilizada, com sucesso, em vários sistemas de teste.
As duas taxas de dados estão definidas no controlador CAN FD, de forma independente uma da outra, utilizando dois registos de tempo de bits. A comutação entre as duas taxas de dados é efetuada utilizando dois bits de controlo no protocolo. O primeiro bit reservado até agora, é utilizado como o bit "Extended Data Length" (EDL), e define uma mensagem CAN FD devido ao seu nível recessivo. A comutação da taxa de bits atual é efetuada por um bit recentemente adicionado, o bit "Bit Rate Switch" (BRS), no qual uma comutação para o bit superior é realizada no momento da recolha das amostras. A mudança de comutação é realizada no momento em que o bit de restrição CRC é recolhido para amostra.
Dados alargados de utilizador
Os dados de controlo continuam a ser transmitidos utilizando as bem conhecidas taxas de bits reduzidas, limitando, dessa forma, as taxas de dados alcançáveis. Ao aumentar a área de dados do utilizador até a 64 bytes, mais dados poderão ser enviados em modo de transferência rápido, aumentando, dessa forma, eficazmente a taxa de dados.
A CAN clássica providencia apenas 8 bytes de dados, o que já não é suficiente para muitas aplicações de dados, p.ex. para transmitir valores analógicos de elevada precisão ou para controlar um robô multi-axial com os seus diversificados valores de codificação e comandos de acionamento. Para isto, torna-se também necessário adicionar dados de serviço, o que, até agora, reduziu significativamente a eficácia devido aos protocolos de transporte necessários para a transmissão de mais de 8 bytes.
A CAN FD providencia agora a opção de utilizar até 64 bytes de dados. Com este procedimento, podem ser transmitidos blocos de dados maiores numa única mensagem, particularmente no caso de dados de processamento, dispositivos mais complexos podem agora ser completamente controlados utilizando apenas uma única mensagem de processamento. Para dados de serviço, a necessidade de transportar protocolos é reduzida, uma vez que uma única mensagem CAN FD é, frequentemente, necessária apenas para a configuração de dados e semelhantes.
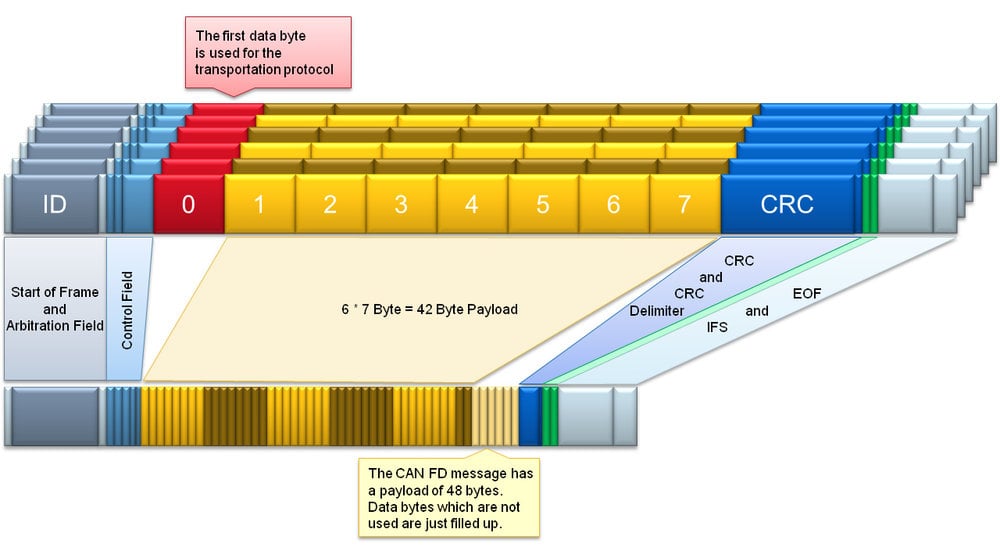
De forma a prevenir o alargamento dos dados de controlo desnecessariamente, a CAN FD também utiliza apenas 4 bits para o código de comprimento de dados; os valores 0 a 8 são retirados diretamente da CAN clássica. Os valores que estavam, até agora, indefinidos (9 a 15, i.e. 1001 a 1111) são utilizados para os novos comprimentos alargados de dados: para além de 0 a 8 bytes, estão também agora disponíveis 12, 16, 20, 24, 32, 48 e 64 bytes para os dados de utilizador. Os comprimentos de dados que diferem destes não são possíveis, isto é, as áreas não utilizadas têm de ser enchidas com "valores de enchimento".
Para além da transmissão rápida da área de dados, a taxa de dados efetivamente utilizável pode ser significativamente aumentada utilizando a CAN FD e o tempo do ciclo pode ser consideravelmente reduzido. Desta forma, a rede CAN FD com 500 kBits de arbitragem, 4 MBits de transmissão de dados e 64 bytes de dados pode alcançar uma taxa de dados eficiente de mais de 5 MBits/s.
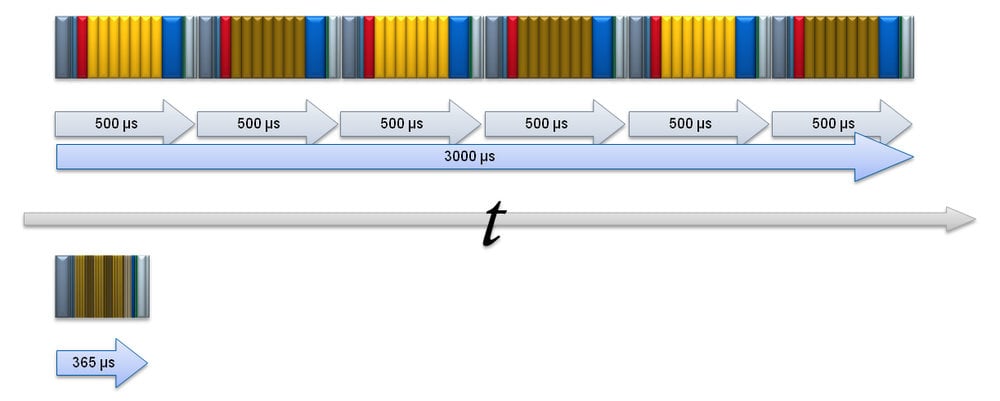
Imagem 2: Vantagens da CAN FD 2 A figura mostra as mensagens CAN apresentadas na fig. 1 num único cronograma: para a CAN clássica é assumida aqui uma taxa de dados de 250 kBits/s. Para mensagens com 8 bytes de dados de utilizador (1 byte para o protocolo de transporte e 7 bytes de dados de utilizador no exemplo) e o máximo número possível de bits de enchimento; uma mensagem CAN clássica necessita de aprox. 500 µs de tempo de bus. Se o nó de transmissão conseguir enviar todas as seis mensagens consecutivamente sem demora, o bus ficará completamente bloqueado durante três milésimas de segundo para transmitir os 42 bytes de dados de utilizador. Comparativamente, uma mensagem CAN FD com 48 bytes de dados de utilizador, 250 kBits/s de taxa de arbitragem e 2 MBits/s de taxa bit de dados ocupa o bus em apenas 365 µs, também com o número máximo de bits de enchimento. A transmissão de dados significativamente mais rápida melhora também o comportamento em tempo real dos sistemas CAN devido aos tempos de resposta marcadamente mais curtos e, ao mesmo tempo, aumenta a taxa de dados e reduz a complexidade da administração de dados!
Capacidade em tempo real
A combinação de múltiplos pacotes de dados independentes numa única mensagem significa que a administração de dados é realizada de forma consideravelmente mais simples, uma vez que as mensagens individuais já não necessitam de ser sincronizadas umas com as outras a elevado custo. A transmissão rápida de grandes pacotes de dados comparativamente com a CAN clássica, permite a transferência de 8 vezes o volume de dados (64 bytes) em aproximadamente o mesmo tempo que seria necessário para uma mensagem clássica CAN de 8-bytes. Desta forma, as mensagens de alta prioridade podem ser transmitidas muito mais rápido e a capacidade em tempo real melhorada.
Segurança de dados
A segurança de dados é um tópico importante: Apesar do tamanho aumentado dos pacotes de dados em comparação com a CAN clássica, a CAN FD preenche os mesmos requisitos no que respeita a segurança de dados. Esta situação é alcançada utilizando fatores de verificação CRC mais longos com algoritmos adaptados, por exemplo. Dependendo do número de bytes de dados transmitidos, é utilizado um de três algoritmos CRC diferentes: a fórmula CRC anterior para mensagens com até 8 bytes de dados, assim como dois algoritmos reforçados com até 16 bytes de dados ou mais de 16 bytes de dados para mensagens. O algoritmo a ser utilizado pelo controlador CAN é determinado pelo código de comprimento dos dados.
Para uma segurança de dados melhorada, foram implementadas sugestões adicionais. Como resultado, o CRC nas mensagens CAN FD inicia sempre com um bit de enchimento; após outros 5 bits é incluído um bit de enchimento adicional, contrariamente à regra de bits de enchimento CAN, esta é independente dos valores bit dos bits anteriores. Cada bit de enchimento possui o valor complementar do bit anterior.
Retrocompatibilidade
Uma desvantagem da comutação a partir do CAN para sistemas de comunicações mais rápidos, é o frequente requisito para uma conversão completa: Todos os participantes CAN têm de estar adaptados ao novo sistema, p.ex. EtherCAT. Em alternativa, o controlador da máquina pode ser alargado para utilizar múltiplas redes heterogéneas. Ambos os procedimentos oferecem vantagens e desvantagens. Utilizar o CAN FD, uma opção adicional "mais suave" também está agora disponível: Como os controladores CAN FD também podem ser utilizados como nós CAN clássicos, todos os nós de rede podem ser gradualmente substituídos por dispositivos CAN FD habilitados. Assim que toda a rede CAN FD estiver habilitada, as vantagens do CAN FD podem ser utilizadas na íntegra. Isto é de particular interesse para maquinaria com finalidades especiais, uma vez que os participantes na rede que não podem ser substituídos por nós disponíveis livremente, são, frequentemente, também utilizados aqui, particularmente dispositivos específicos de clientes ou dispositivos desenvolvidos internamente.
Ferramentas disponíveis para o CAN FD
Estão disponíveis várias soluções para o desenvolvimento de dispositivos e redes baseados em CAN FD, em particular placas de interface PC-CAN FD para uma ampla variedade de interfaces de PC, por exemplo, as placas IXXAT CAN-IB 500/600 PCIe das redes HMS. Estas placas CAN contêm uma variedade abrangente de pacotes de controladores para Windows, Linux e outros sistemas operativos, permitindo uma ligação fácil em sistemas existentes e uma adição rápida de pacotes de software existentes a redes CAN FD, uma vez que suportam CAN e CAN FD.
Para além das interfaces de hardware com o relevante software dos controladores, são necessárias ferramentas de teste e de análise para a implementação eficiente do CAN FD. Relativamente a esta questão, a HMS irá disponibilizar brevemente uma solução completa de elevado desempenho, a um preço convincente, por meio de uma versão habilitada CAN FD do bem conhecido IXXAT canAnalyser.
Tópicos em aberto para o CAN FD no setor industrial
Para além das ferramentas acima mencionadas, existem mais aspetos importantes para utilizar o CAN FD num ambiente de produção. É recomendável aplicar protocolos padronizados mais elevados para utilização em aplicações industriais: na CiA (CAN in Automation) o trabalho está a ser realizado convertendo o CANopen em CAN FD - a especificação CANopen V5 que contém também extensões para CAN FD, é esperada estar disponível para meados deste ano.
Um aspeto adicional importante para utilizar o CAN FD reside em microcontroladores económicos que estão disponíveis em quantidades, com controladores CAN/CAN FD integrados. Os dispositivos disponíveis até agora, utilizam maioritariamente FPGAs com núcleos CAN FD IP. Os microcontroladores com lógica CAN FD integrada são frequentemente componentes de elevado desempenho com múltiplos núcleos CPU para dispositivos controladores complexos em veículos. Até que fiquem disponíveis os microcontroladores simples, rentáveis e com assistência CAN FD integrada, os sistemas baseados em FPGA representam a solução mais flexível.
Perspetivas
A CAN FD aumenta a área de aplicação para soluções baseadas em barramento CAN por meio de taxas de dados significativamente melhoradas, uma simples configuração e a retenção de opções de análise conhecidas a partir de bus de campo clássicos. A disponibilidade iminente de CANopen para CAN FD significa que o novo sistema de rede pode ser implementado no setor industrial e oferece uma solução eficaz para redes com uma taxa de dados de 100 kbits/seg. a 5 Mbits/seg. Com a opção de utilizar as taxas de dados mais elevadas ou a plataforma de dados aumentada, individualmente ou em combinação, o design flexível da CAN FD torna-a extremamente adequada como um sistema de bus de campo adaptável para maquinaria com finalidades especiais.


Autor Thomas Waggershauser.
Diretor de vendas na IXXAT Automation GmbH, parte do Grupo HMS
